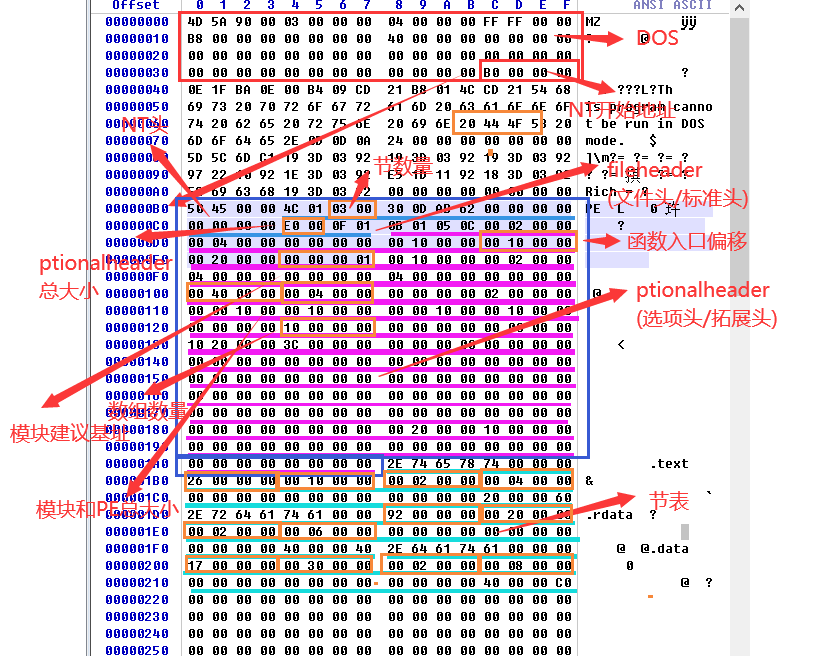
选项头 IMAGE_OPTIONAL_HEADER:以供操作系统加载PE文件使用,32位必选。
重要字段:
DWORD AddressOfEntryPoint; 入口点
DWORD ImageBase 建议模块地址
DWORD SectionAlignment; 内存对齐值
DWORD FileAlignment; 文件对齐值,
DWORD SizeOfImage; 模块在内存中总大小,与 SectionAlignment 对齐
DWORD SizeOfHeaders; PE头总大小,与 FileAlignment 对齐
IMAGE_OPTIONAL_HEADER 结构体
typedef struct _IMAGE_OPTIONAL_HEADER {
WORD Magic; // 32位PE: IMAGE_NT_OPTIONAL_HDR32_MAGIC , 0x10b.
// 以 _IMAGE_OPTIONAL_HEADER 结构体解析
// 64位PE: IMAGE_NT_OPTIONAL_HDR64_MAGIC , 0x20b.
// 以 _IMAGE_OPTIONAL_HEADER64 结构体解析
BYTE MajorLinkerVersion; // 主链接器版本号 (无用)
BYTE MinorLinkerVersion; // 副链接器版本号 (无用)
//系统分配内存不看着3个值,但是对于调试器有影响(影响反汇编所用内存大小,OD是机器码个数*2,字节数是通过SizeOfCode 得到)
DWORD SizeOfCode; // 代码所占空间大小 (没啥用)
DWORD SizeOfInitializedData; // 已初始化数据所占空间大小 (没啥用)
DWORD SizeOfUninitializedData;// 未初始化数据所占空间大小 (没啥用)
DWORD AddressOfEntryPoint; // *oep:原本的程序入口点(实际为偏移,+模块基址=实际入口点)
// ep: 被加工后的入口点
//这个值可以修改,但是修改过后必须跳转到在该偏移处跳转到真正入口
DWORD BaseOfCode; // 代码基址 (无用)
DWORD BaseOfData; // 数据基址 (无用)
DWORD ImageBase; // *建议模块地址:exe映射加载到内存中的首地址= PE 0处,即实例句柄hInstance
// 一般而言,exe文件可遵从装载地址建议,但dll文件无法满足 (开了随机基址可能也不是这个值,是通过重定位表得到)
//这个值最好不要改,改的话要改动大量地方,因为函数和全局变量的地址也需要跟着改变
DWORD SectionAlignment; //内存对齐值,数据在内存的对齐值,很多内存地址,大小都要依赖他来计算
//默认1000h 一个分页大小,系统管理内存是以分页为单位
DWORD FileAlignment; //文件对齐值, 200h,磁盘的一个扇区大小 (vc6是1000h)
//文件的起始位置和大小都是跟文件对齐值对齐的
// 对齐值都是2的倍数 如果把所有节合并了 就可以设为1,否则不可以随便修改因为要配合节检查
//主副系统相关版本号 除了 MajorSubsystemVersion 不可修改,其他5个可以
WORD MajorOperatingSystemVersion;
WORD MinorOperatingSystemVersion;
WORD MajorImageVersion;
WORD MinorImageVersion;
WORD MajorSubsystemVersion; //主子系统版本号 不可以修改 这里改成4可以再xp运行
WORD MinorSubsystemVersion;
DWORD Win32VersionValue; // win32版本值 xp上不可以改 ,win7和win10可以修改
//改值是通过节表计算得到的
DWORD SizeOfImage; //模块在内存中总大小,与 SectionAlignment 对齐,改的话不可以改变分页数量(但最好对齐)
DWORD SizeOfHeaders; // PE头总大小,与 FileAlignment 对齐
DWORD CheckSum; //校验值 3环程序随便改,0环程序会检查,不允许改 可以用 MapFileAndCheckSum 计算值
WORD Subsystem; //子系统 不允许修改 /subsystem
WORD DllCharacteristics; //描述应用程序的一些相关信息(例如是否开了随机基址等),可以改,但不能随便改
//这四个值可以改,但是不能改得太离谱
DWORD SizeOfStackReserve; //栈保留
DWORD SizeOfStackCommit; //栈提交
DWORD SizeOfHeapReserve; //堆保留
DWORD SizeOfHeapCommit; //堆保留
DWORD LoaderFlags; //跟调试相关,目前用不到,值可以随便改
DWORD NumberOfRvaAndSizes; //下面数组个数(最小可以改为2,最大为16,前2个表是导入,导出表,必须要有)
//数据目录表(成员2个 dword 第一个是内存偏移,第二个大小 )
//描述PE中各种个样的表的位置和大小,每个下标对应一个固定的表(前2个不能改,导入,导出表,改了无法调API)
IMAGE_DATA_DIRECTORY DataDirectory[IMAGE_NUMBEROF_DIRECTORY_ENTRIES]; //柔性数组 个数由上面值决定,但是总大小为16个
} IMAGE_OPTIONAL_HEADER32, *PIMAGE_OPTIONAL_HEADER32;
AddressOfEntryPoint EP
OEP 程序入口点 - Old Entry Point
如果 EP 没有被修改的话 OEP = EP ,但是很多时候为了隐藏程序入口点 通常会修改 EP 的值
例如 原本 AddressOfEntryPoint 的值为1000 可以改成 1100 ,那么模块基址 + 1100 的地方就成了程序入口点 再到 该地址 执行跳转指令 ,可以挑战转到 偏移 为 1000 处或者 跳转到其他地方在跳回 偏移 1000处
ImageBase 建议模块基址
命令行编译的时候可以通过 /base修改
link /subsystem:windows /base:0x01000000 pe.obj
名称

开了随机基址,PE里面就会有一个重定位表,记录了所有需要修改的地方,没开没有
节表 IMAGE_SECTION_HEADER
●描述PE文件与内存之间的映射关系,说明PE文件的指定内容拷贝至内存的哪个位置、拷贝大小及内存属性的设置。
●一个结构体总大小为 0x 28 (40) 字节
如何定位节表
●节表置于选项头之后,位置 = 选项头( IMAGE_OPTIONAL_HEADER) 的地址
+ 选项头( IMAGE_OPTIONAL_HEADER)的大小。
节表字段的意义
// IMAGE_SECTION_HEADER 节表结构体,大小40B
typedef struct _IMAGE_SECTION_HEADER {
BYTE Name[IMAGE_SIZEOF_SHORT_NAME]; // 节表名称:描述性字段 2个字节
// 下方4个字段:从文件S1处开始,拷贝S2大小的数据,到内存S3处,有效数据占用内存S4大小
union {
DWORD PhysicalAddress;
DWORD VirtualSize; // S4:内存大小
} Misc;
DWORD VirtualAddress; // S3:内存地址:基于模块基址,与SectionAlignment对齐(0x1000)
DWORD SizeOfRawData; // S2:文件大小,与FileAlignment对齐(0x200)
DWORD PointerToRawData; // S1:文件偏移,与FileAlignment对齐(0x200)
//跟调试相关
DWORD PointerToRelocations; // 无用
DWORD PointerToLinenumbers; // 无用
WORD NumberOfRelocations; // 无用
WORD NumberOfLinenumbers; // 无用
DWORD Characteristics; // 节内存属性,取值IMAGE_SCN_...系列宏 分低位和高位
} IMAGE_SECTION_HEADER, *PIMAGE_SECTION_HEADER;
空节
文件大小和偏移都为0
编译器一般用来存放未初始化的数据
节表与OD复制到文件功能的关系
- 由于内存是基于分页管理,所以要注意区块与页的关系。
节表字段的关系
- 关系:各个节之间是连续不间断的(除特殊节.textbss)。但是系统检查没那么严格改成不对齐也没事(修改 VirtualSize 的值或 SizeOfRawData ),但是不能改变分页情况,最好连续
-
- 下一个节的PointerToRawData = 上一个节的PointerToRawData+SizeOfRawData。
- 下一个节的VirtualAddress= 上一个节的VirtualAddress+VirtualSize对齐后的值(+0x1000)。
- SizeofImage PE文件在进程内存中的总大小=
-
- 算法1:最后一个节的virtualAddress + VirtualSize对齐后的值(+0x1000)
- 算法2:各个节占内存大小的总和+PE头大小(对齐后0x1000)。
最后一个节点数据不能随便改,再便宜为 0c处的 存的是资源信息表

地址转换 FA,VA和RVA的转换
FA --- file Address 文件地址(文件偏移)
VA --- virtual Address 虚拟内存(内存中的绝对地址)
RVA --- relative virtual Address 相对虚拟地址(基于模块基质的偏移,内存偏移)
注意:
通过FA 一定可以找到对应的 VA地址 因为文件对齐位200h,比内存偏移1000h小
VA地址不一定可以找到对应的 FA 地址 内存偏移 大于 当前节 200h是 , 文件中没办法找到对应偏移
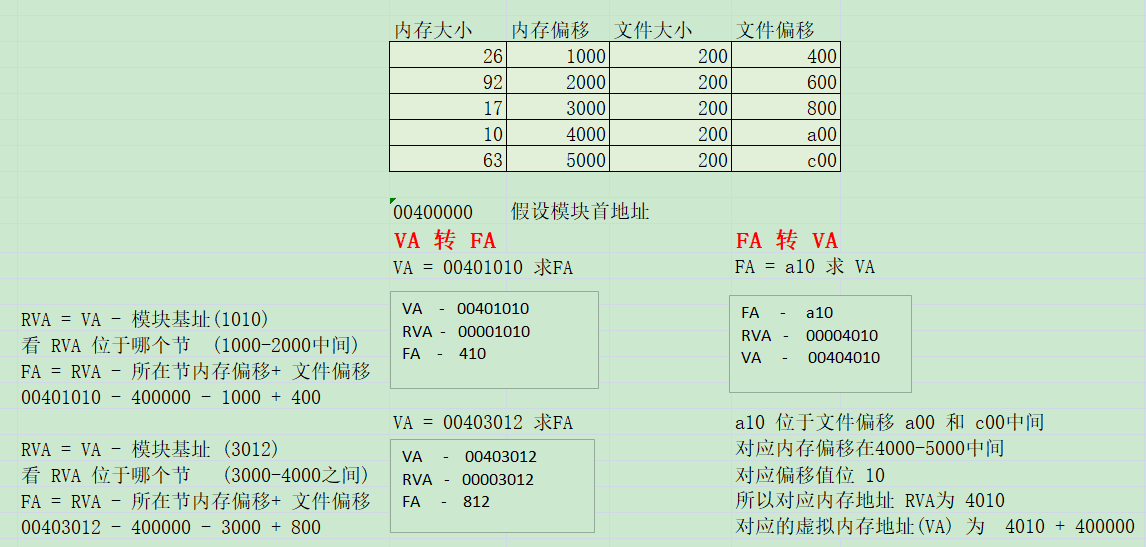
VA 转 RVA
RVA = VA - ImageBase
RVA 转 FA
VA -> FA
- 计算相对虚拟地址:RVA = VA - ImageBase
- 定位RVA所在的节,查节表,定位所在节
- 计算节内偏移:= RVA - 所定位节表virtualAddress字段的值
- 计算FA = 节内偏移 + PointToRawData
特殊的节:文件大小和偏移都为空,这叫空节,虽然不映射文件,但是会申请空间。

FA - > VA
- 定位节
- 计算节内偏移 = FA - PointRawData
- 计算相对虚拟地址:RVA = 节内偏移 + VirtualAddress
- 计算绝对虚拟地址:VA = RVA + ImageBase


 雷达卡
雷达卡 发表于 2025-1-12 21:52:26
发表于 2025-1-12 21:52:26
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶